
Ever wondered how Linux stays so responsive — even when hundreds of devices are fighting for the CPU’s attention?
When I was recently preparing for a corporate training on Linux Network Drivers, I came across one of my all-time favorite kernel design marvels — the Interrupt Handling Mechanism.
And if you’ve ever worked with something like the Wiznet W5500 SPI-to-Ethernet module, this story will sound familiar…
⚡ When the Interrupt Hits
Imagine your W5500 chip just received a network packet. It immediately raises an interrupt line to the processor — essentially saying:
“Hey CPU, I’ve got data waiting for you!”
Now, in most systems, that would block the processor until the data is handled.
But Linux? It’s smarter.
Instead of doing everything right away, Linux says:
“Okay, let’s do the urgent part now… and defer the rest.”
And that’s where the magic begins.
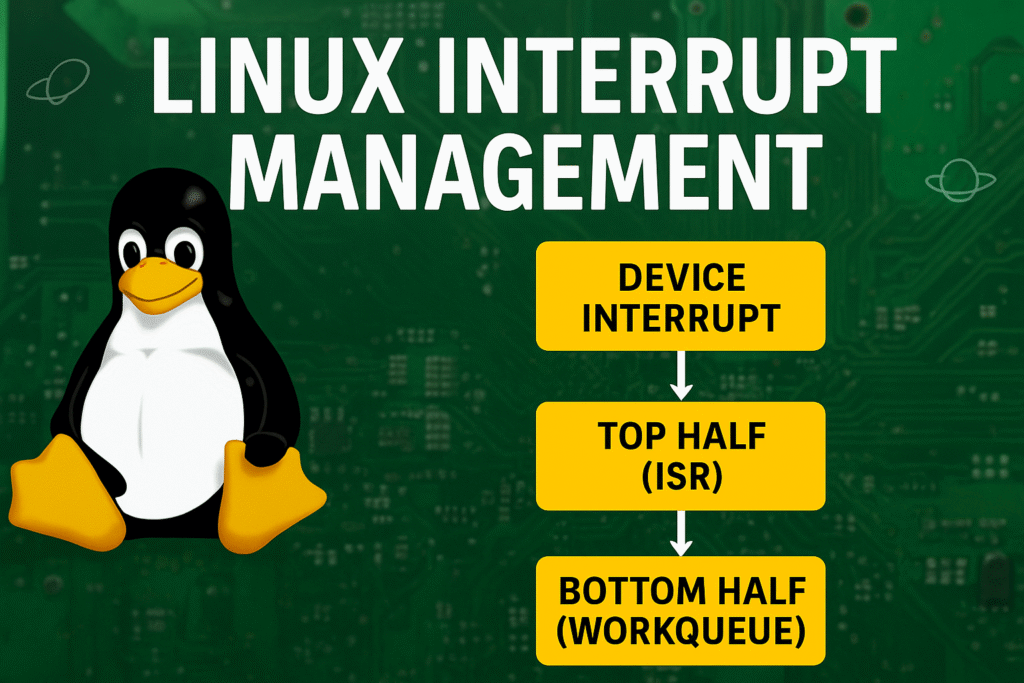
🧩 The Two Halves of an Interrupt
Linux divides interrupt processing into two halves — each with a distinct role and timing.
🧠 Top Half (ISR)
This part executes immediately when the interrupt occurs.
Its job? Keep it short and fast.
In our W5500 network driver, the top half simply:
- Reads the interrupt register
- Checks which event occurred (Rx done? Tx done?)
- Acknowledges the interrupt
- Schedules further processing
That’s it. Quick and clean.
⚙️ Bottom Half (Workqueue / Tasklet)
This is where the heavier lifting happens — safely outside the interrupt context.
It might handle packet buffers, update data structures, or pass data up the network stack.
By deferring this work, Linux ensures minimal latency for the system — even when multiple interrupts arrive back-to-back.
💡 Why This Matters
This clever split gives Linux three key advantages:
- Low latency: The system responds instantly to hardware signals.
- High scalability: The kernel can juggle many devices efficiently.
- Stability: Complex work runs in a safer, schedulable context.
For embedded engineers, understanding this mechanism is more than theory — it’s a practical gateway to writing efficient, real-time drivers.
🔍 A Real-World Example: W5500 SPI-to-Ethernet
When developing a driver for the Wiznet W5500, you’ll find that the ISR (top half) doesn’t handle packets directly.
Instead, it merely acknowledges that “something happened.”
Then a workqueue (bottom half) is scheduled to process the data, freeing the CPU to deal with other critical tasks in the meantime.
This division is what makes Linux drivers elegant yet robust — it’s why your system doesn’t freeze when 10 interrupts fire simultaneously.
🧗♂️ Why You Should Master This
If you’re aspiring to grow in the embedded Linux domain, mastering concepts like Top and Bottom Halves is a turning point.
It’s what separates a driver user from a driver developer.
In fact, this is exactly the kind of practical, hands-on learning we dive into in our
👉 Project-Oriented Embedded Linux Device Drivers Training
🚀 Final Thought
Every time I see an interrupt handled gracefully by Linux, I can’t help but think —
“This is where hardware meets harmony.”
So the next time your system pings the CPU for attention, remember:
Linux already knows who should handle it first… and who should finish it later. 😉